Remotely Controlled Prosthetic Robot Hand
Tamimi December 07, 2018 [Professional] #Robots #Prosthetic #platform #Arduino #Cloud #Realtime Communicationvid1: The Prosthetic arm in action, controlled by kids too!
Preface
This project was among numerous projects I supervised while working at Fleming College. These projects were integral to the students' program. However, they were not merely academic exercises; they were applied projects with real budgets and actual sponsors. Consequently, at the conclusion of these projects, which typically spanned two or three semesters, the sponsors would determine the project's success or failure based on the project requirements.

Img1: Prosthetic arm in its almost-final form!
Introduction
This project was executed by my students, and my role was primarily to mentor them. I ensured that they delivered the project as per the sponsor's requirements while aligning their work with project management principles and methods.
Requirements
The project required the creation of a prosthetic arm that could be controlled over the internet by a user, mimicking their finger movements in real-time.
Architecture Diagram
TBD
Scope
The project underwent the following stages and iterations:
First stage, the design of the architecture
The students decomposed the project into a Work Breakdown Structure (WBS), assigned a timeline, identified the materials that needed to be procured, and established the major milestones.
Second stage, the first physical iteration
This stage involved the assembly of components. As expected at this stage, servo motors were loosely connected to a breadboard, and components were fastened together with zip ties. However, the focus was to ensure the core functionality was in place, i.e., sensors were reading hand movements, transmitting them over the internet, and servo motors were moving accordingly
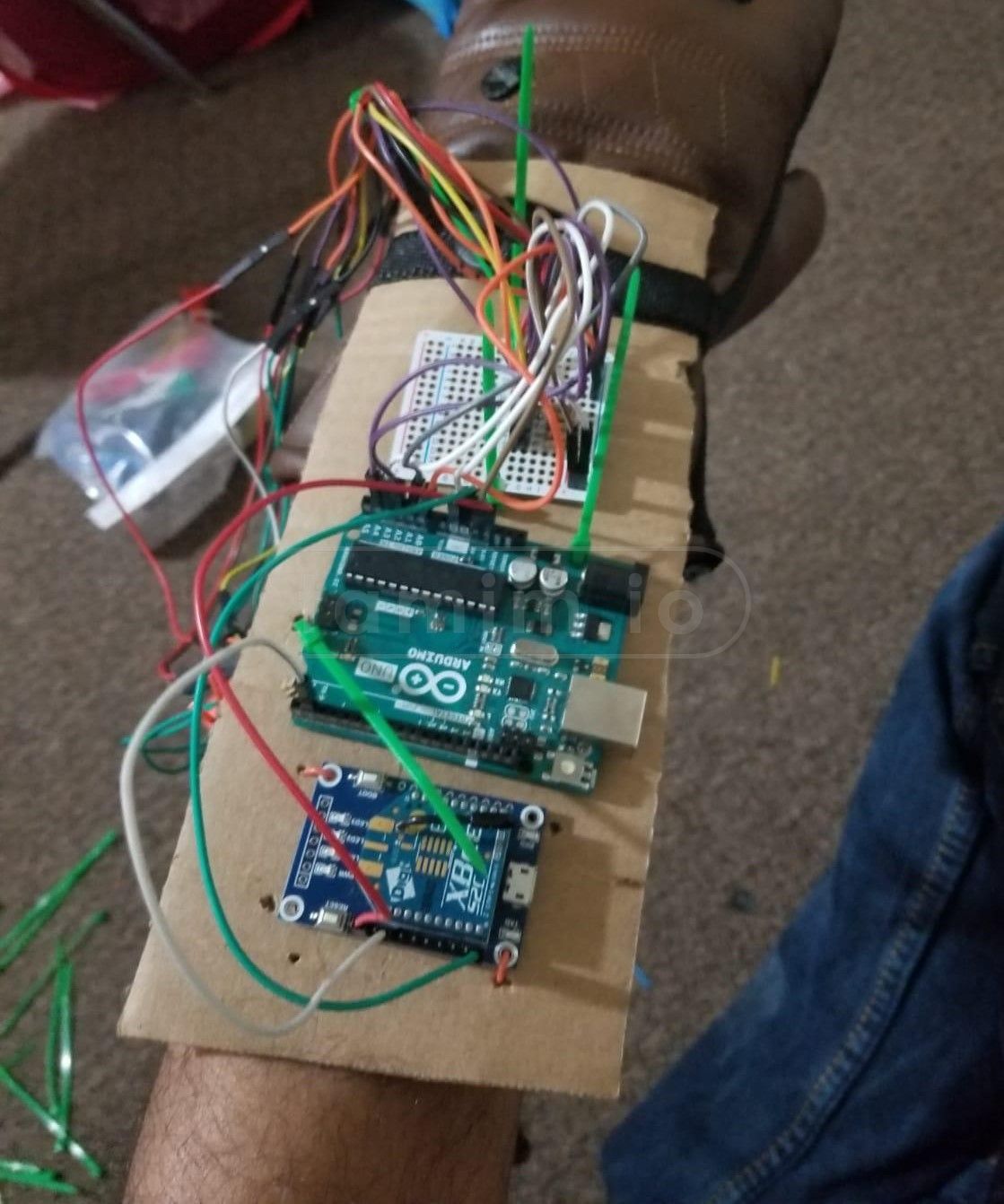
Img2: First iteration of the Project in this image, you can see the transmitter side of the project, dorky I like it, it had this futuristic aesthetics, it is like coming straight up from cyberpunk!
Third stage, improving the previous iteration
During this stage, the students 3D printed a hand to test the movements. The hand was calibrated to mimic the movements of a real hand. Additionally, the students worked on reducing the size of the transmitter in the glove side.
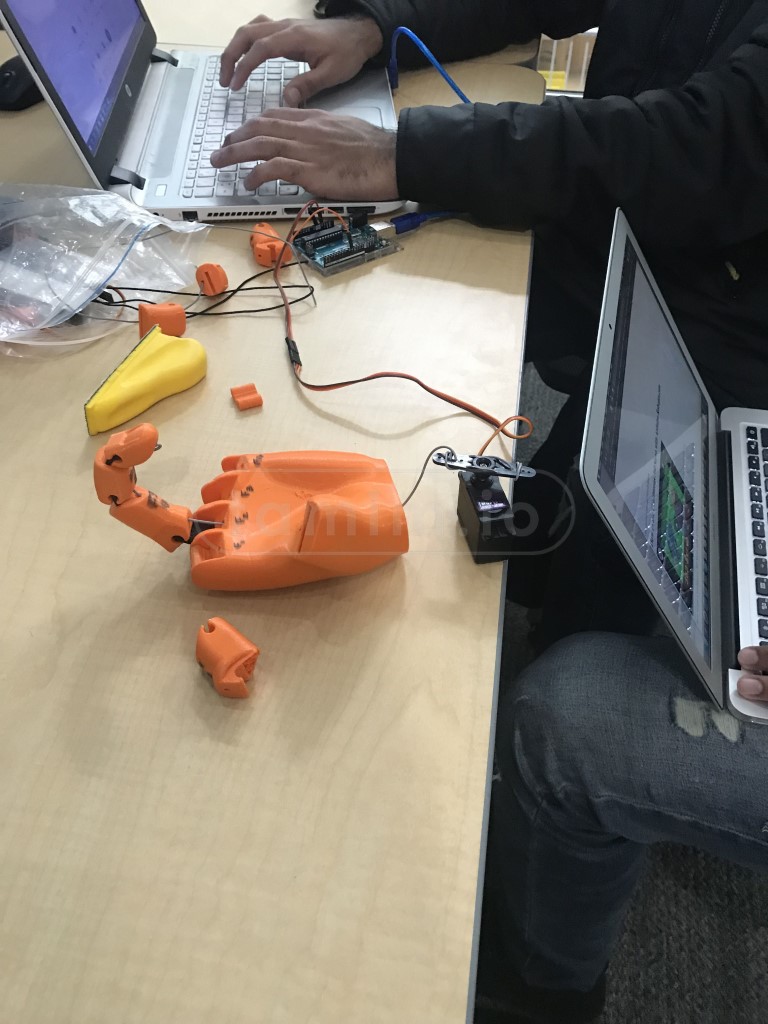
Img3: Second iteration of the Project in this image, the 3D printed hand is visible with some strings to control the joints are connected to the servos
Fourth stage, final hardware iteration
The previous hardware iteration for the hand model functioned well, but had several issues. The movements of the fingers were not as smooth as those of a real hand, and there were instances of 'finger freeze', where the finger would not move. This was due to the 3D printed model not being precise or well-engineered enough. The students decided to outsource the model and purchased a pre-made hand model with joints. Additional elements such as strings, calibrations, a servo compartment, and an electronics area were added.
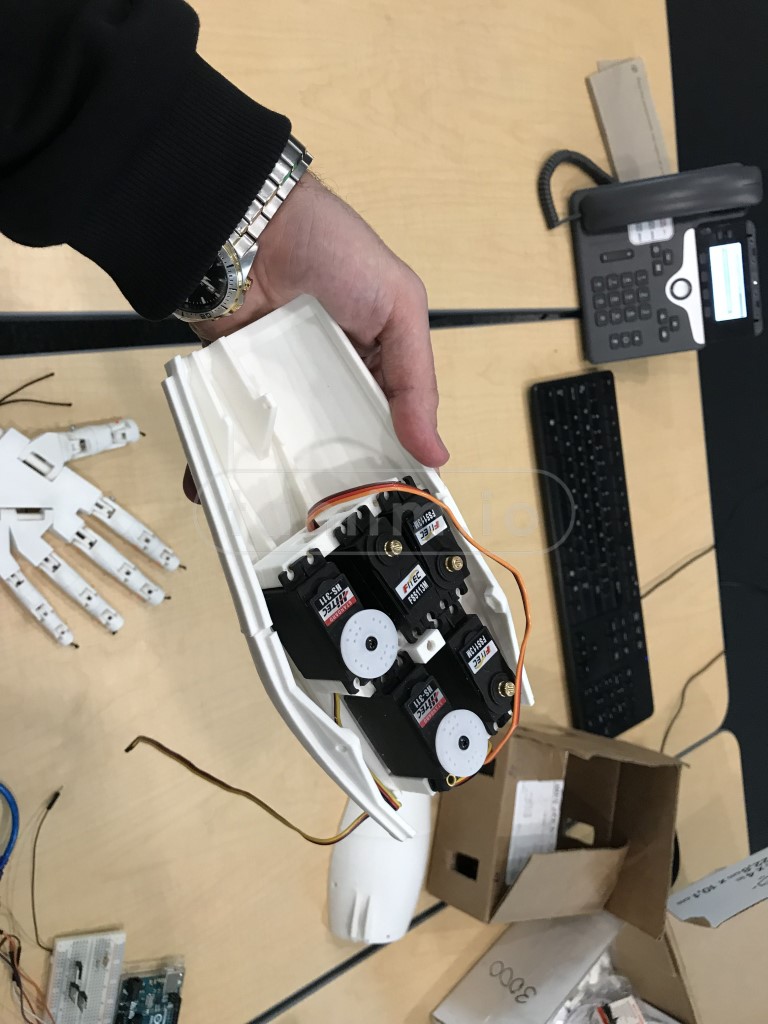
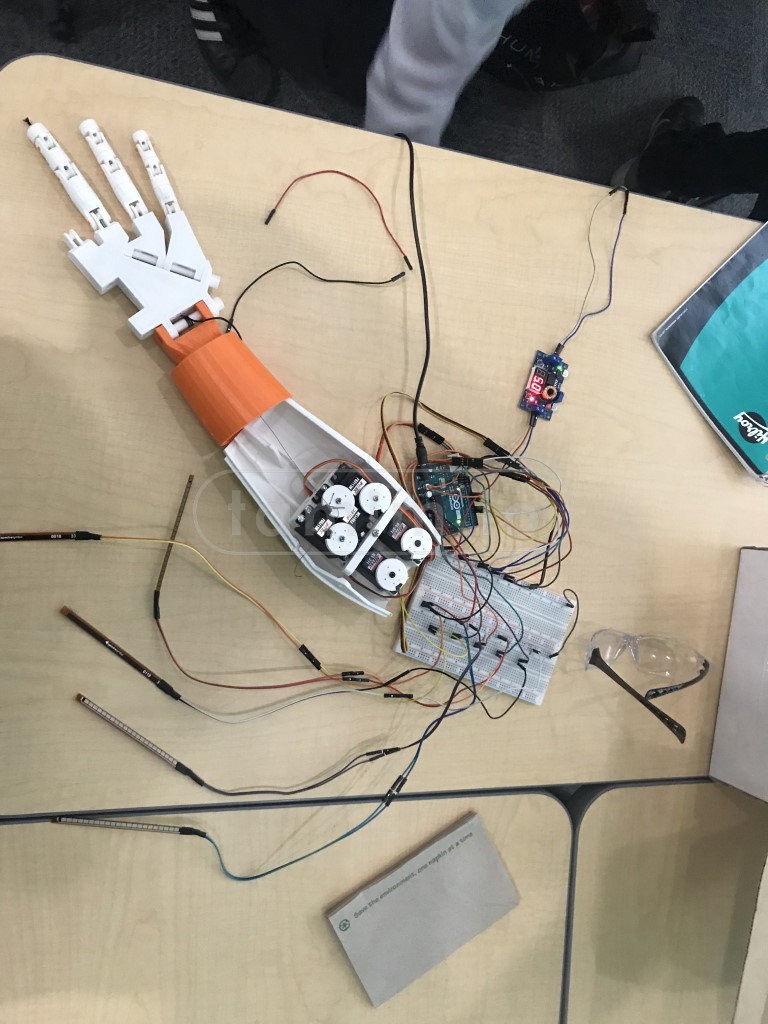
Img4/5: Improving the hand model
Last stage, Testing it!
After assembling all the components, it was time to test the project against its requirements. The first step was to conduct local testing to eliminate any potential communication issues, either in the network or the cloud. This meant directly connecting the sensor wires to the servos.
vid2: Testing the Prosthetic arm locally and directly with no remote connections
Second step was to test the remote functionality over the internet.
vid3: Testing the Prosthetic arm over the internet
Results
The results of this project were outstanding! In addition to satisfying the project sponsor, the project won two awards at the BELL Innovation Annual Award competition. It secured first place in the Innovation category and second place in the Presentation category.

Img6: The students holding the awards/arm with myself and the sponsor!
Note: The comment section is powered by Cactus/Matrix. If you use the official Matrix server, you are good to go. However, if you use your personal Matrix server, make sure to log in with the first button and use your own client. This is because my CSP only allows Cactus/Matrix domains to connect from this site, and most likely, your profile picture will be broken!