IndroPilot: Drone Over Cellular 5G Platform
Tamimi February 17, 2023 [Professional] #drone #robots #Drone Delivery #platform #indropilot #BVLOS #UAV #5G #Cellular #Autonomy #ground station🚧Note: This article is in progress, some minor future edits might be added, as well as some extra media where is needed.🚧

Img1: The platform (Indropilot) in action
Abstract
InDroPilot is the Next-Generation modular Platform enables 5G cellular connectivity on drones/UAV/RPAS for BVLOS Ops, completely developed from the ground up, InDroPilot emphasizes on modularity, expandability, and reliability, while being user-friendly with the minimum configurations needed to be up in the air!
InDroPilot was developed during the project NERDs (Refer to the article about NERDs project for more details) and used/tested successfully in several major projects with different clients like AED Drone Delivery over cellular 5G Project and Remote photogrammetry survey over cellular 5G in Brazil
Video
TBD
Major Components
InDroPilot is an eco-system platform that consists of three major components:
- InDroCaptain (On-board), taking care of all on-board navigation.
- InDroLink, take care of the ultra reliable low latency link between the pilots, operators, payload operators, and the drone in the real time.
- InDroBase, The ground station side, pilots and operators use for C&C and Telem, as well as video streams and any other payload controls.

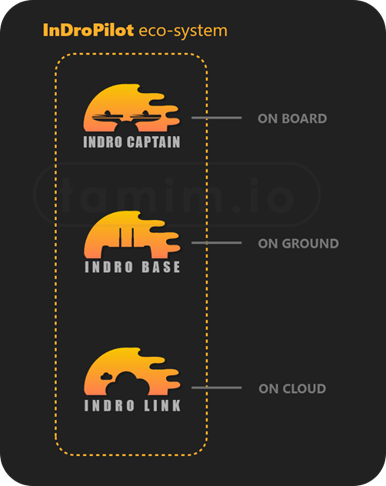
Img2/3: Platform components with in the platform
High-Level Features
- Next-gen platform empowering the mission with command and controls, telemetry links, and all comms to ground stations with mission autonomy and centimeter-position accuracy (depends on airframe GPS)
- Supports 5G out of the box, both NSA (non-standalone) and SA (standalone), with LTE/3G fallback
- System agnostic, works on all architectures (ARMv8, ARMv7, AMD64, etc.)
- Drone agnostic, supports all pixhawk-based drones/RPAS.
- Modular, supports wide range of integrations with several payloads.
- Reliable for mission-critical operations and BVLOS.
- Ultra-reliable low latency connection, All links are encrypted with state-of-the-arts crypto (AES-256 cipher with RSA-4096 handshake encryption and SHA-512 hash authentication on both control and data channels) and in compliance with compliance with ISO27000 and NIST800.
- Powerful edge-computing units powered by NVIDIA for AI/ML, real time transcoding, and processing.
- Next-gen platform empowering the mission with command and controls, telemetry links, and all communications to ground stations with mission autonomy and centimeter-position accuracy
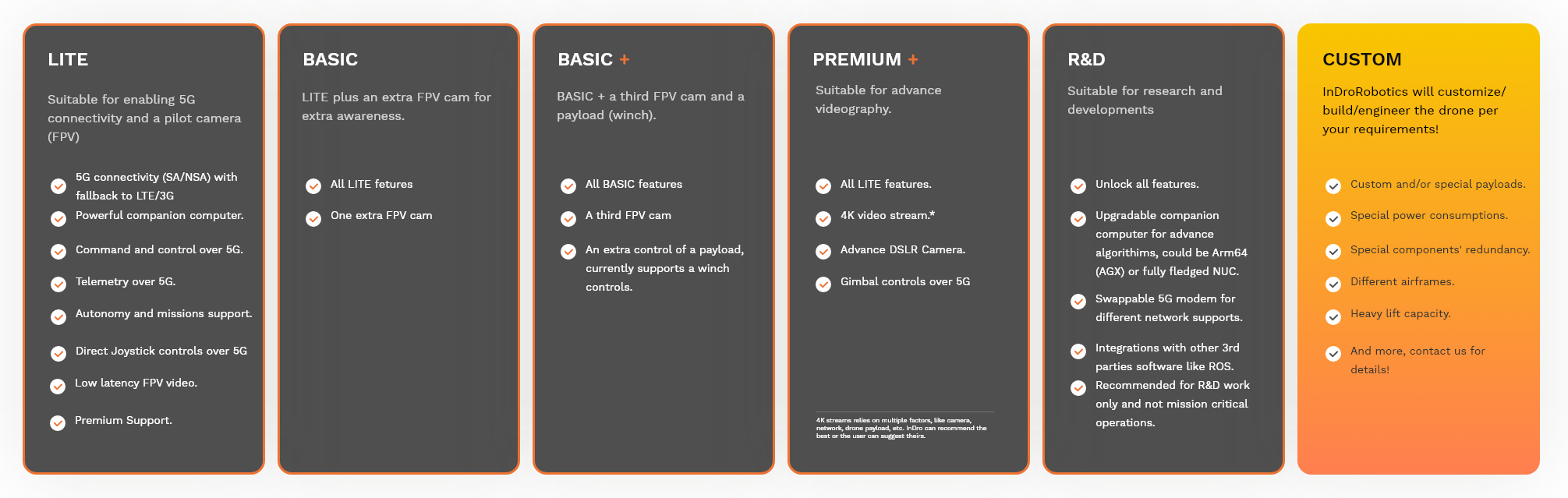
Img4: The platform different suites to fit the specific requirements
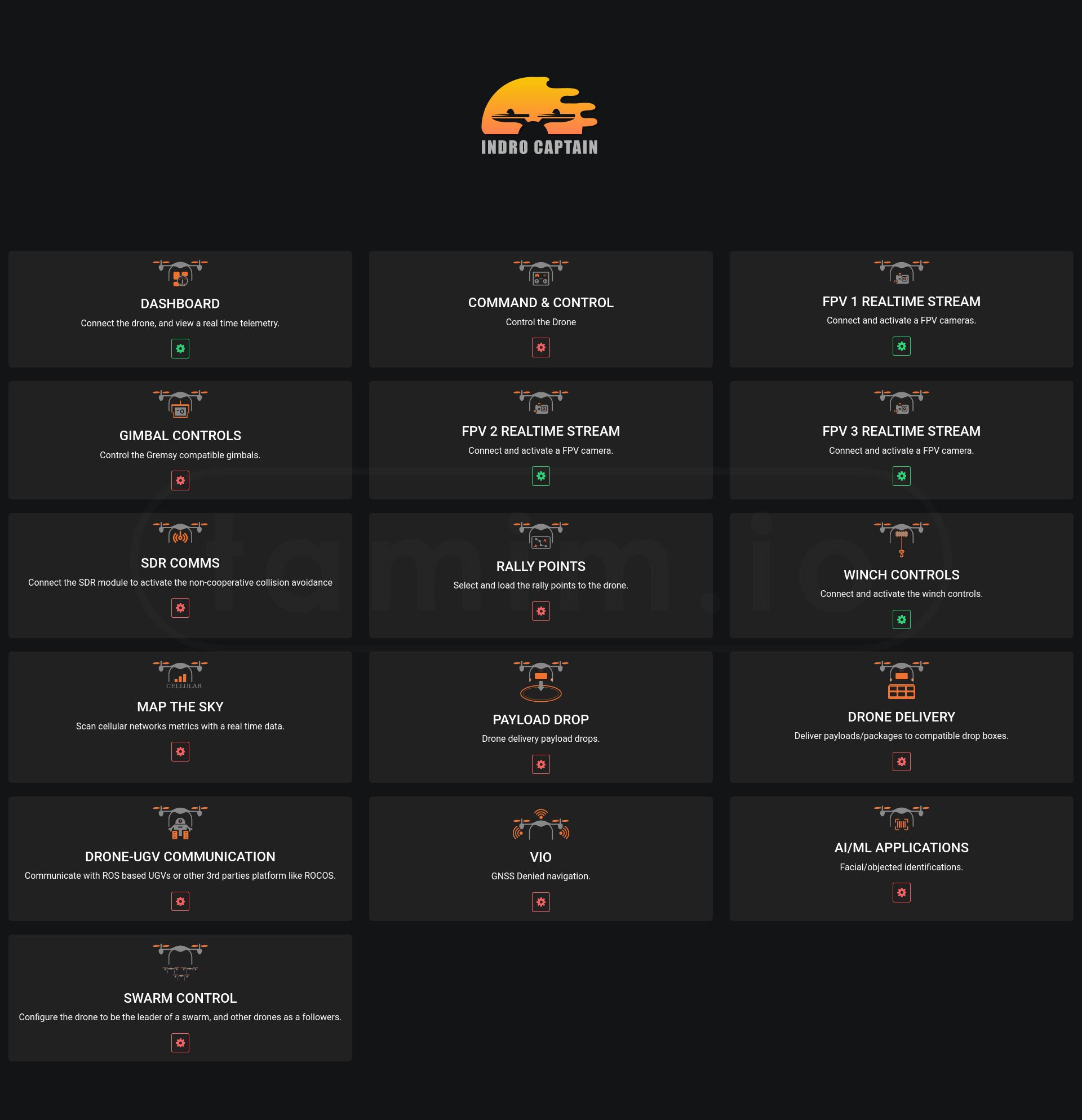
Img5: Different modules within the platform
Platform Real Life Tests 🚀
BVLOS test mission from Vancouver, BC, Canada, Flying a drone Located in Ottawa, ON, Canada
This was an internal company flight test, the pilot was located in Vancouver, BC and the drone was located in Ottawa, ON. The pilot was connected to his home internet, and using the a PS5 controller to fly the drone over the internet utilizing the platform. The test was successful, and marked a major milestone for the development of the platform and the coming BVLOS missions carried over 5G/LTE cellular networks.

Fig1: BC to ON drone BVLOS Flight Test
BVLOS test mission from Plano, Texas, United States, Flying a drone Located in Ottawa, ON, Canada
This was a demonstration of the platform for Ericson, Ericsson was interested in such platform after the major success we had in the project NERDs (Refer to the article about NERDs project for more details), the demo was requested by senior managemts at ericcson in the United States. The pilot was located in Plano, Texas and the drone was located in Ottawa, the test conducted two approaches, one is the manual way by flying with a PS5 controller, the other one was fully autonomous where the drone launch, fly, execute the mission, and then land while having full telemetry and video feed over 5G cellular network. The test was successful, and it was the first BVLOS across north America.
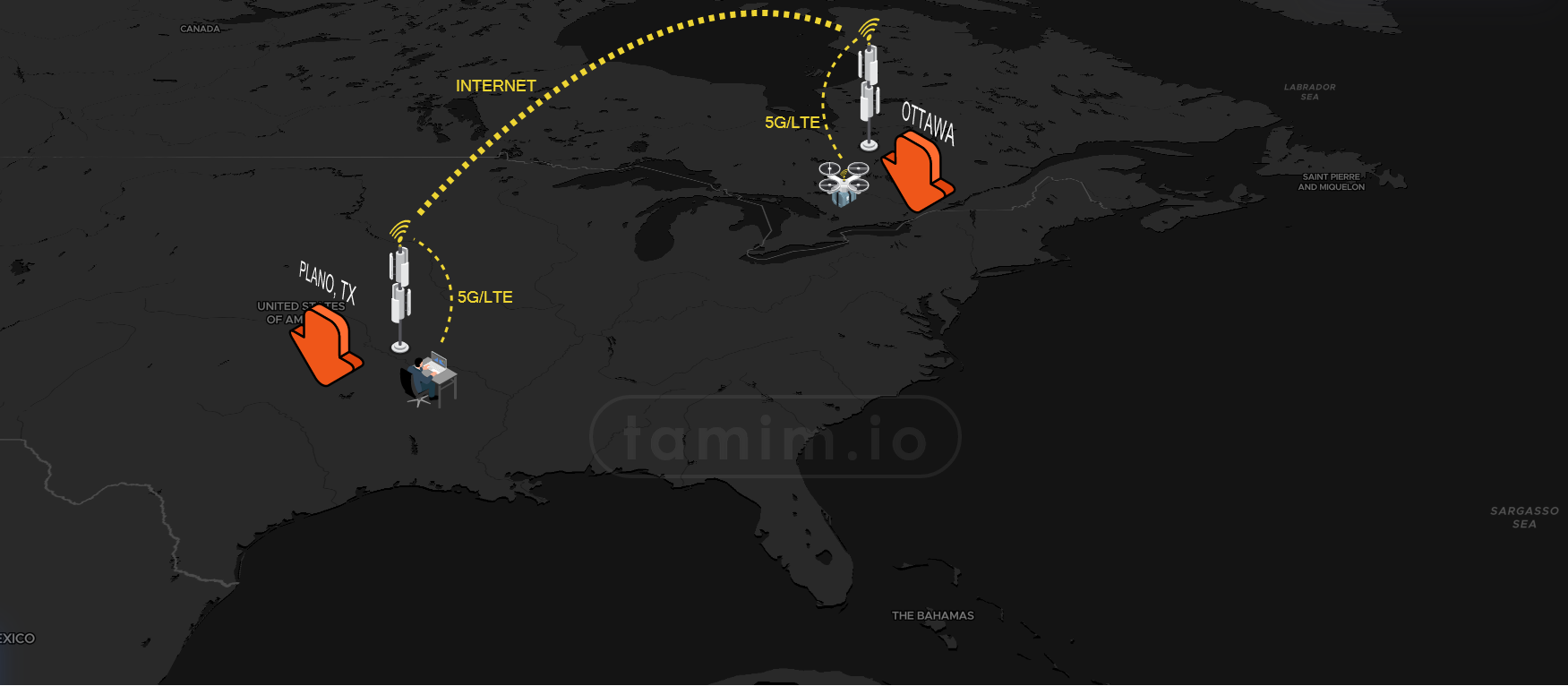
Fig2: US to CAN drone BVLOS Flight Test
BVLOS test mission from Australia, Flying a drone Located in Ottawa, ON, Canada
This test was part of the CANSEC (Refer to the article about CANSEC for more details), the pilot was was located in Australia, and the drone was located in Ottawa, ON. The pilot had full telemtry and video feed for that test. The test was successful, and was the first intercontinental BVLOS mission!
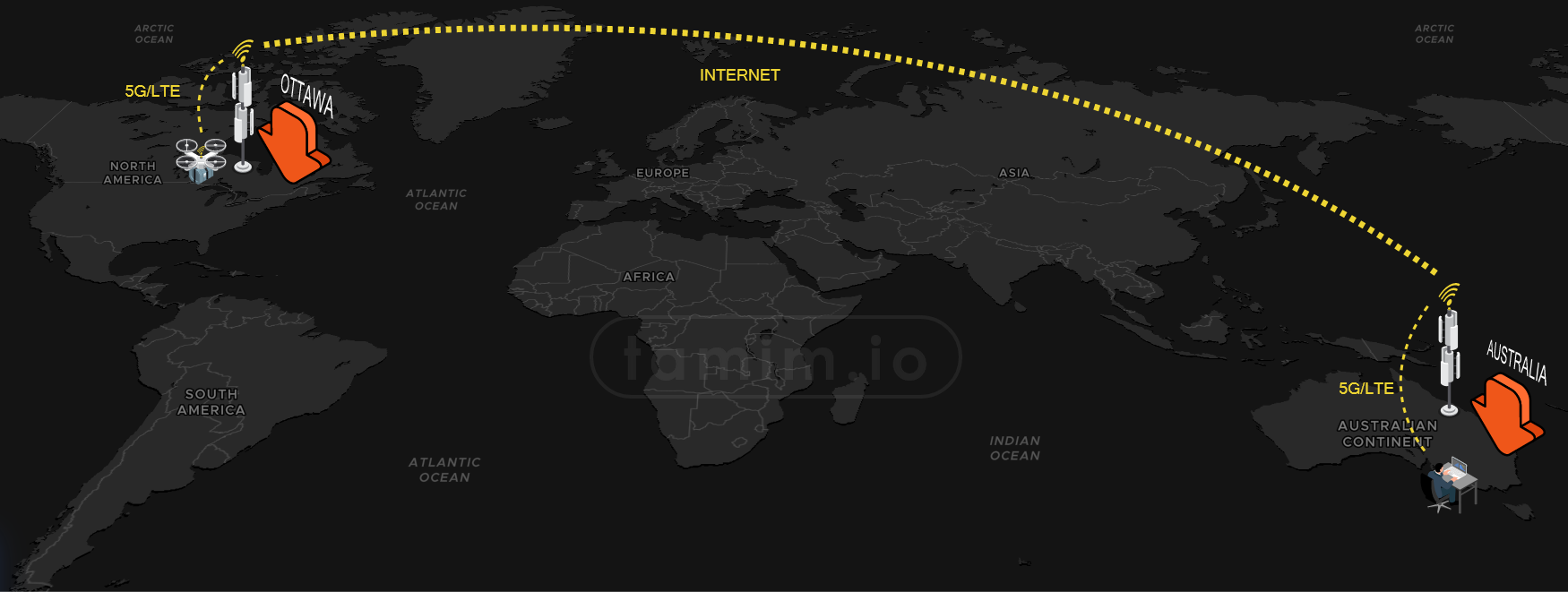
Fig3: AUS to CAN drone BVLOS Flight Test
Platform Architecture
The platfrom architecture followed the block diagram below in general, each big block is one of the three major components listed above, one on board, one at the cloud, and one at the ground station,
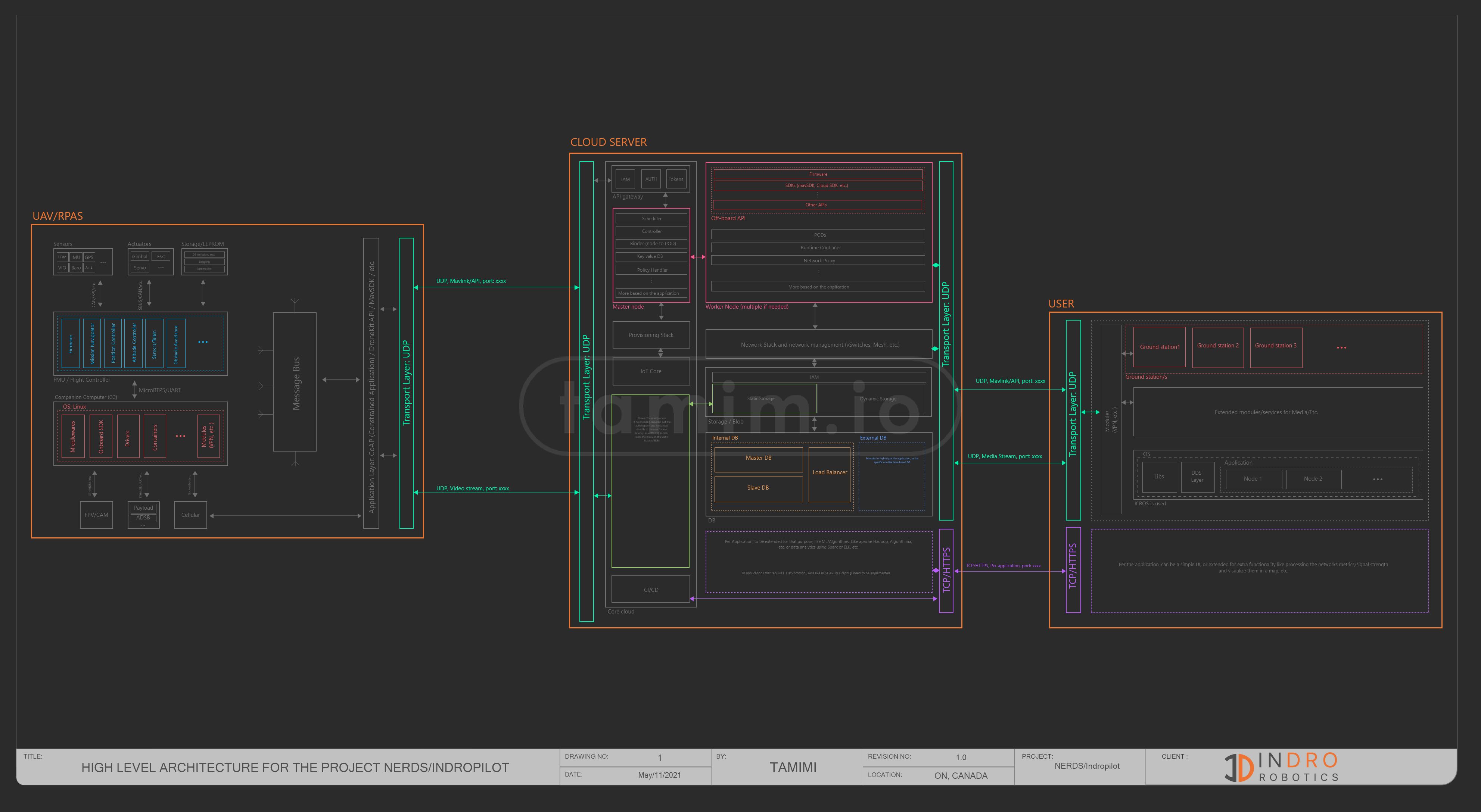
Fig4: Platform Architecture - open the image in a new tab to zoom in
Additionally, the generic block diagram of the system can be found below, generic because it is customizable per the project and requirment, the one below was used in the AED Drone Delivery over cellular 5G Project.
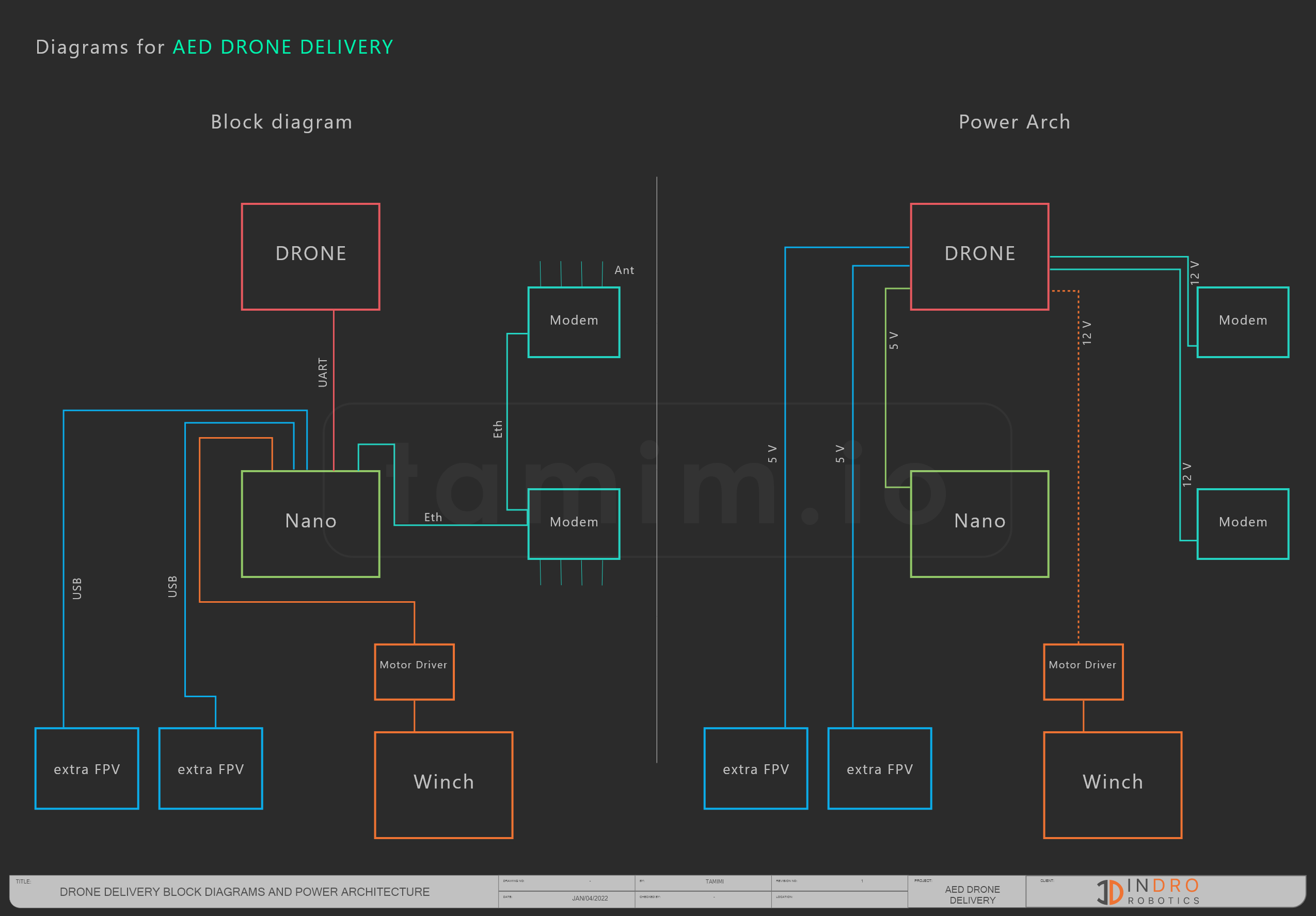
Fig5: Platform hardware block diagrams
Platform User Interface (UI)
Although the user interface was designed to be simple and lightweight rather than a fully fledged UI due to resources constraints from limited on-board hardware, it was fully functional for all the tasks needed top be done before or during the flight, as well as it was stable, lightweight, and self-healing as in if it crashed for any reason, it will automatically restart without affecting the core backend/embedded modules that are responsible for drone communication and flight.
This UI run on the on-board computer (SBC) to manage the agent over the internet, and not to be confused with the cloud interface as well as the ground station interface.
Some screenshots of the UI can be found below:
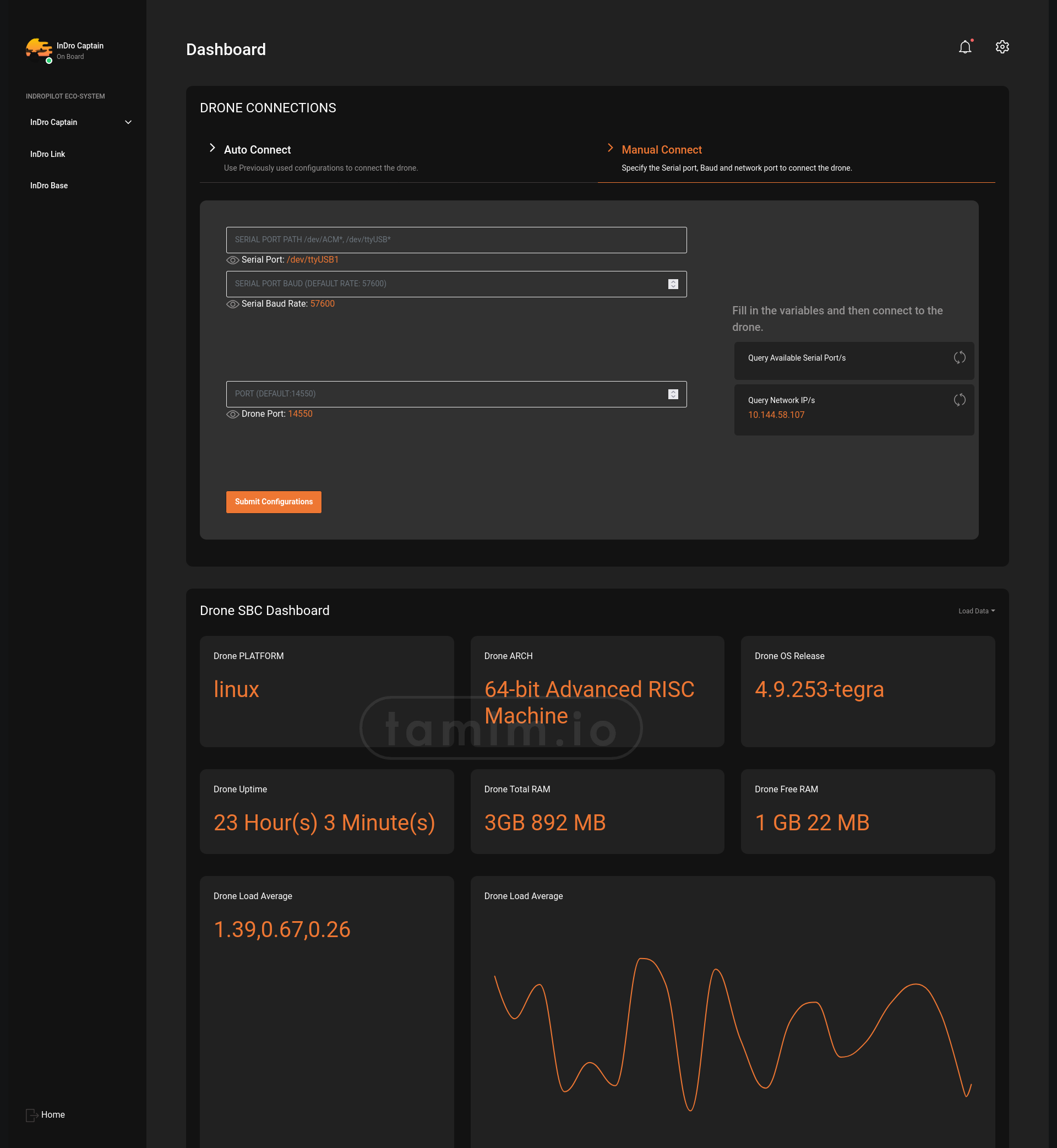
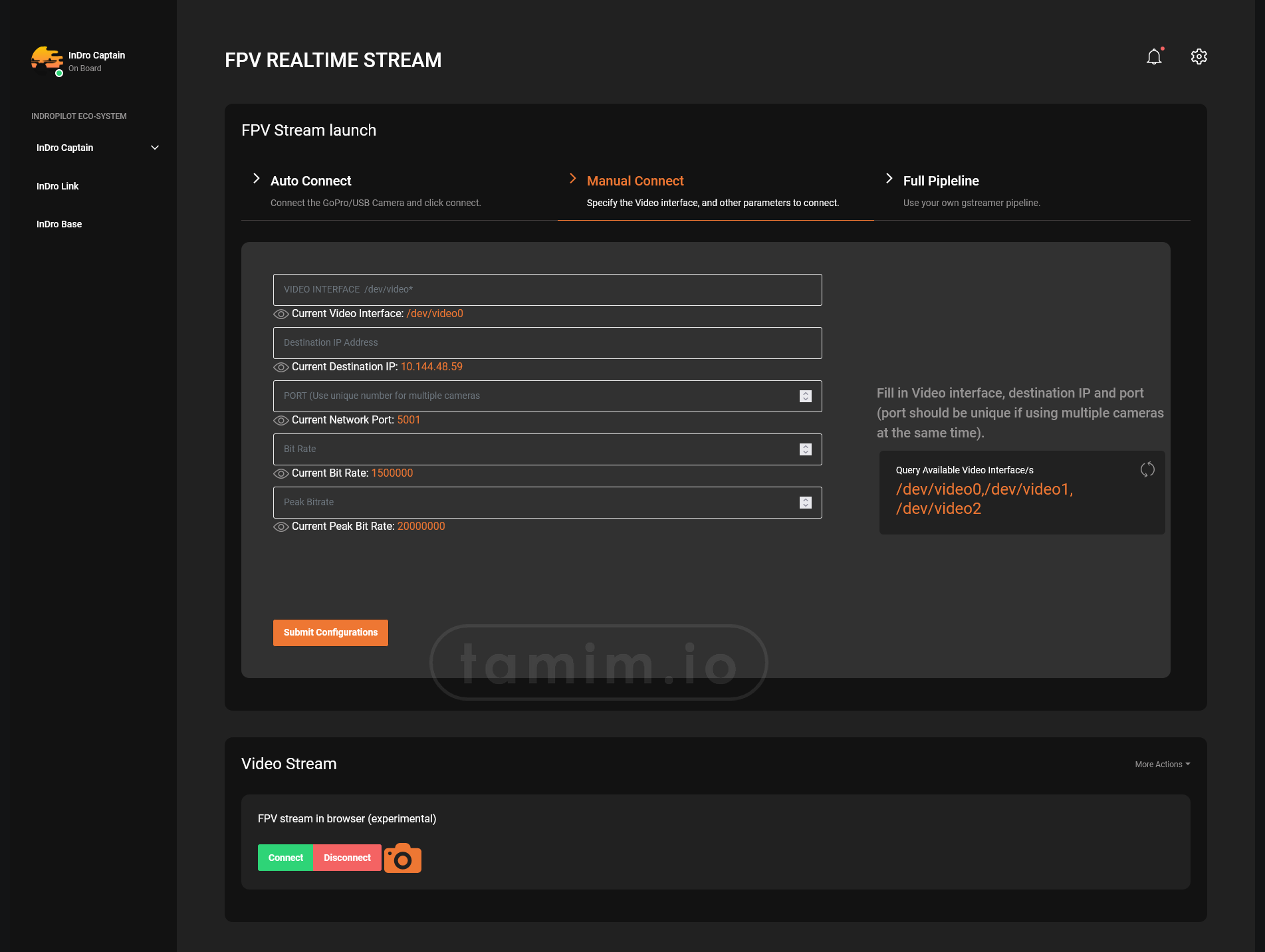
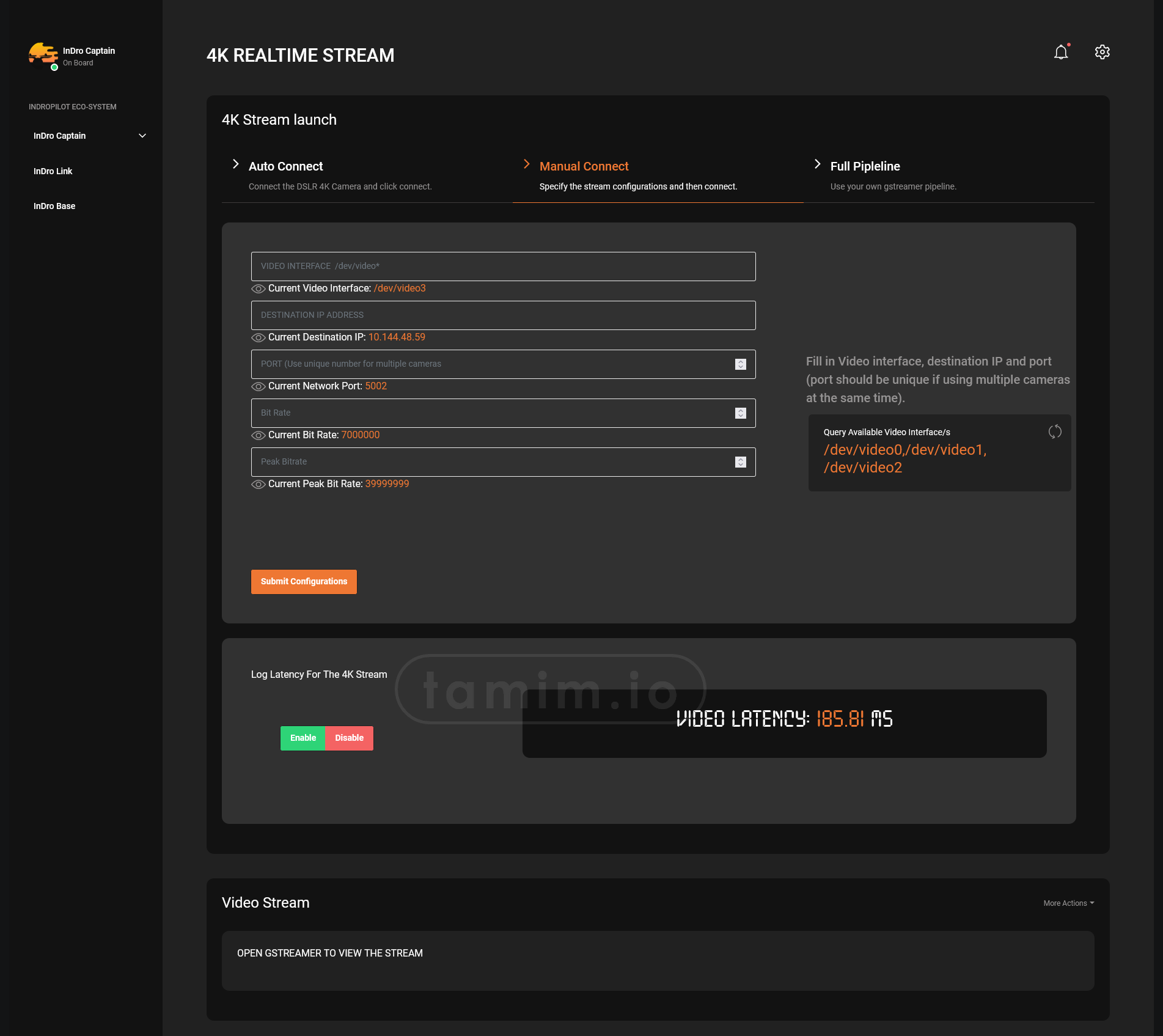
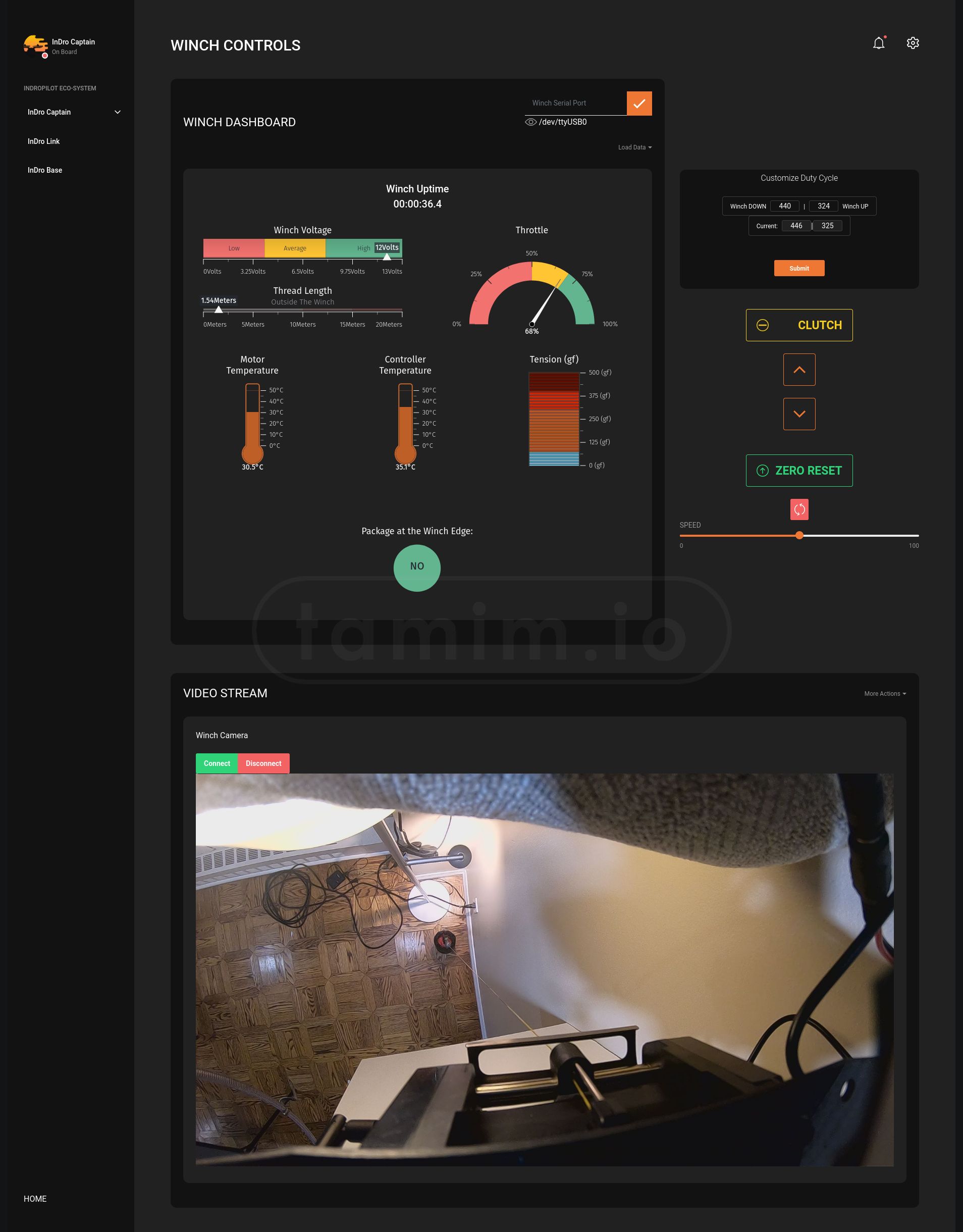
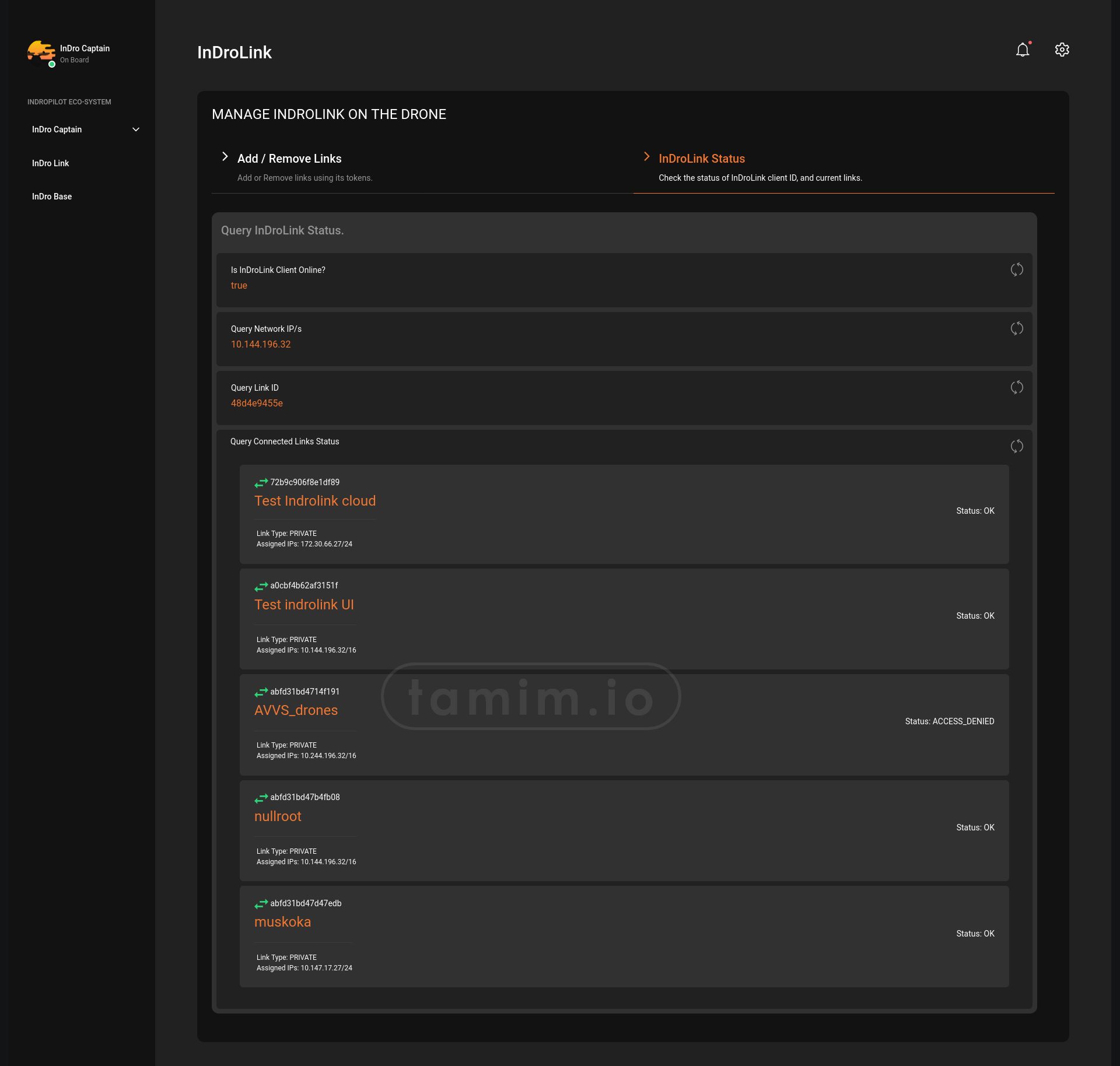
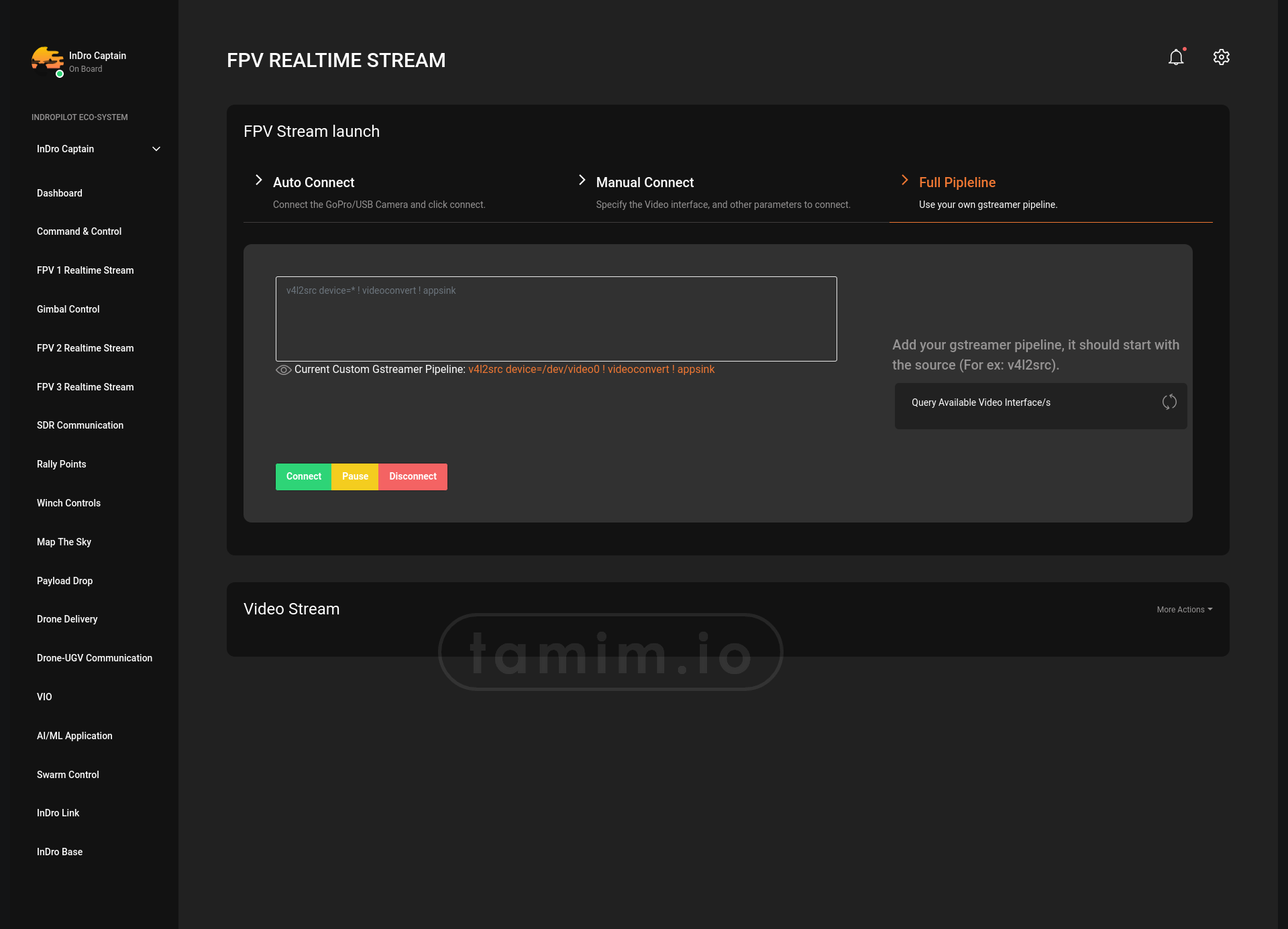
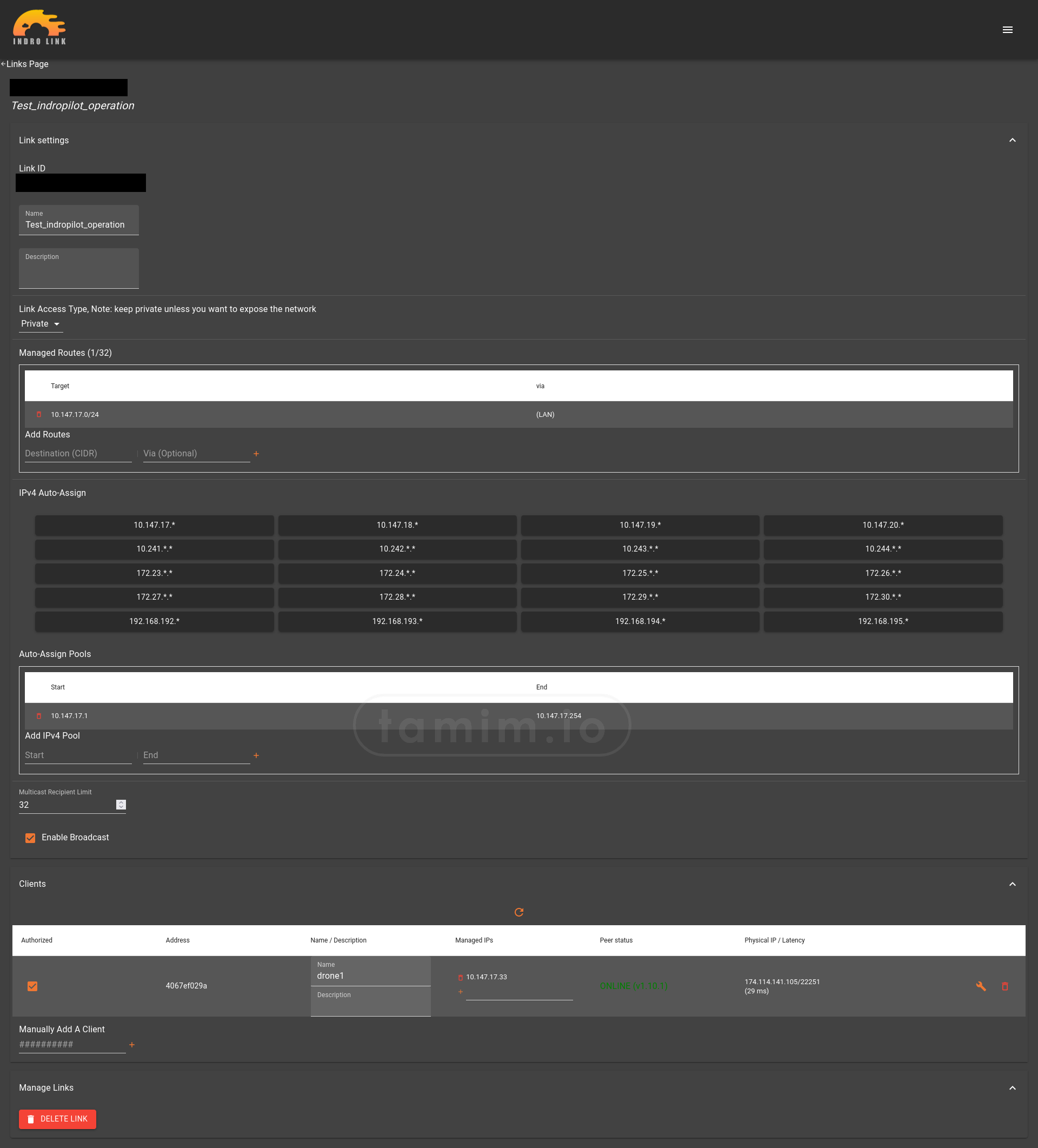
Fig6: Some of the platform on-board UI
Platform Installation
The on-board installation part is a breeze, a simple interactive script will take care of the whole installation process with all the dependencies and compatibility checks.
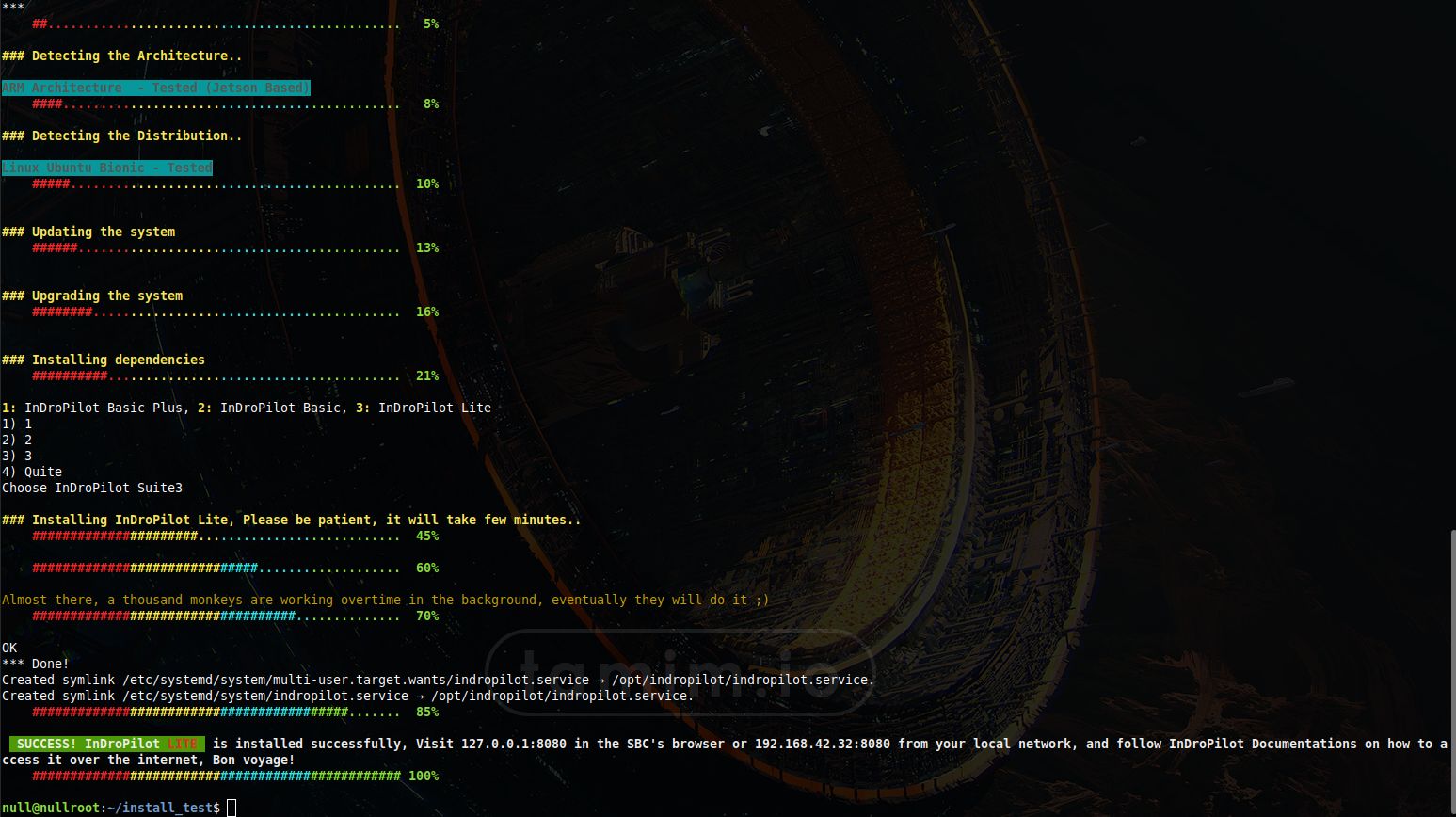
Fig7: Platform installation
Operation
Once the platform is installed on the drone, linked and configured, the pilot can fly the drone over the internet from anywhere in the world with low latency, having full telemetry and Command and Control, video feeds, and other modules in real time, additionally, the pilot can fly the drone in the manual mode (using game controller - seen below) or in the autonomous mode.
vid1: Testing of the platform capability to fly the drone using a joystick (PS5 in here), and as you can see, my colleague flying it over the internet (5G) as if it he was flying with normal RC link/controller!
Final Thoughts and future plans
The platform (Named Indropilot), despite being proven and reliable, it is only the beginning of a promising fully fledged platform with coming new features and enhancements, like extra modules, support for the UGV and qUGV (ROS based), and a fully featured fleet management online platform, stay tuned!


Fig6/7: Future robots to be included in the platform
Note: The comment section is powered by Cactus/Matrix. If you use the official Matrix server, you are good to go. However, if you use your personal Matrix server, make sure to log in with the first button and use your own client. This is because my CSP only allows Cactus/Matrix domains to connect from this site, and most likely, your profile picture will be broken!