UGV Robot TeleOP Integration
Tamimi May 13, 2021 [Professional] #Robots #TeleOps #platform #ROS #5G #Cellular #Autonomy #gstreamer #Realtime Video #agileX #Bunker #Huntervid1: Demonstration of the Tele_operated UGV using the final setup, as seen in the video above, I am driving it with a controller over the internet.
Introduction
This project was mainly an integration work, where several systems, platforms, hardware and software were put together to achieve the goal.
The goal of this work was to make a fully tele-operated UGV (Unmanned Ground Vehicle) over cellular network, supporting both 5G (SA and NSA), LTE, and a fallback to 3G where needed.
Objectives
The main objectives of the project were:
- UGV that meets the client requirements, including battery endurance and small form factor (for the Scout Mini).
- The UGV to be controlled over the internet and through cellular network (5G/LTE), with easy controls (i.e. gamepad joystick).
- The UGV to have real-time video feeds, low latency, and high definition videos.
- Dashboard to monitor and control the robot.
- The ability to extend the functionality in the future with extra components or features like autonomy, object recognition, etc.
vid2: The Scout Mini after it was fully integrated and connected with all system, my colleagues was driving it over the internet to test the functionalities.
Project Components
The project integrated the following components:
- The dummy/chassis robot, which was made by a company called AgileX1. The robot models were Scout mini2 and Bunker3. Some of their specs are as below:
vid3: A promotional video of the Scout Mini, Credit: AgileX
| Specs | Scout Mini | Bunker |
|---|---|---|
| Dimensions | 612-80-245mm W-H-D | 1023-778-400mm W-H-D |
| Weight | 23KG | 145-150Kg |
| Operating Temperature | -10~45°C | -10~45°C |
| Battery | 24V/15Ah | 48V30Ah(Standard) 48V60Ah(Optional) |
| MAX Speed | 3m/s(Standard Wheel), 3m/s(Mecanum Wheel)C | -- |
| Protection Level | IP22 | IP52(Standard) IP54(Optional) |
| Drive Form | Four-wheelfour drive | Left and Right Independent Drive Track Differential Steering |
- The web portal/dashboard, which was done by a company called Rocos, a company that specialized in making cloud-based platform to control ROS-based robots. (Later it got acquired by DroneDeploy4).
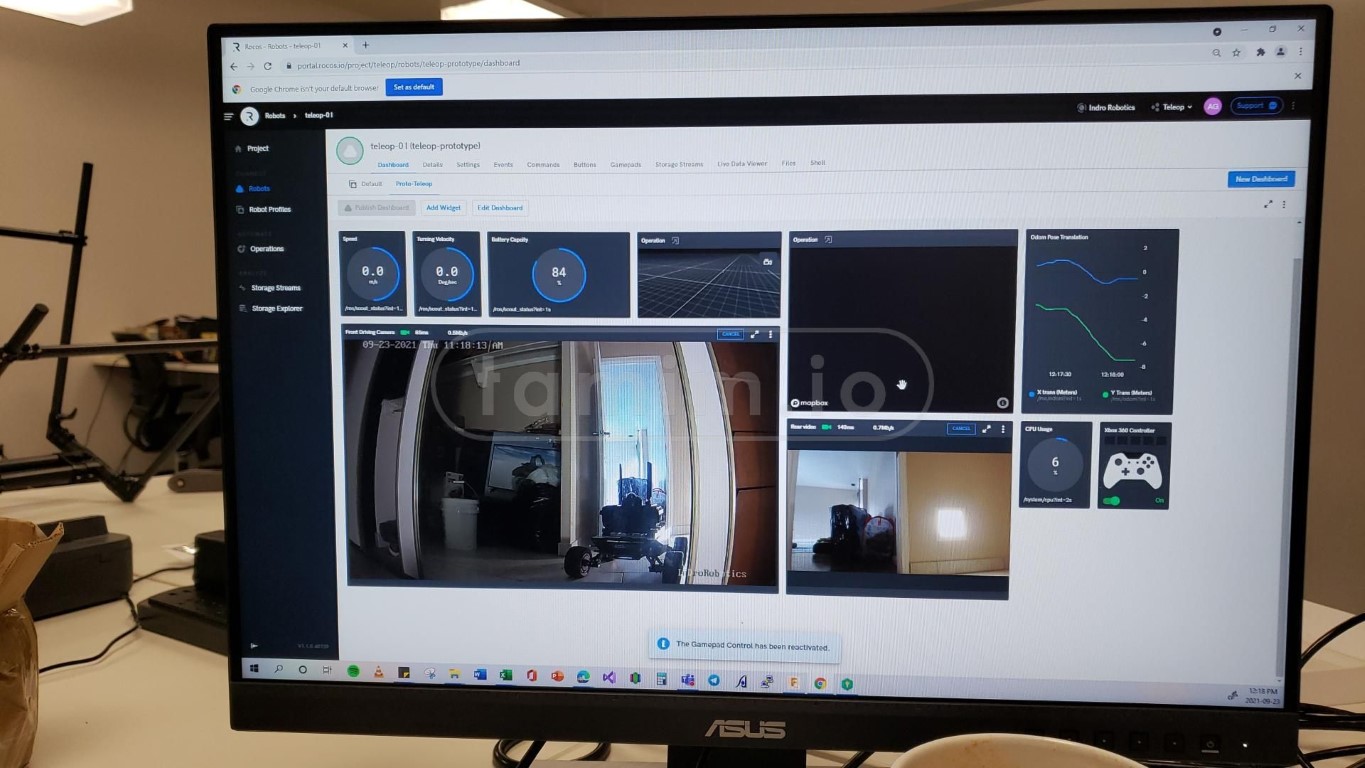
Img1: The robot Dashbaord (By Rocos) after it was integrated to the unit.
-
ROS/ROS2: The popular open source robot operating system, or to be accurate, the middleware. The robot hardware manufacturer (AgileX) provided an SDK that allowed me to make the driver for it.
-
The embedded devices and components, which were later put in a box that was called "Indro Captain", following the naming convention I had for the drone part Indropilot
-
SBC: The SBC was Nvidia Jetson Nano, loaded with all the software needed, ROS, agents, SDKs, drivers, and other necessary software. The OS was Ubuntu 18.04, which was fixed by Nvidia, as their proprietary drivers were only available on that OS.
-
5G/LTE Modem: It was Quectel RM50XQ-AE . I also used a small router from GL-iNET and loaded it with OpenWRT for routing purposes, so that I could load and modify some kernel modules to make the 5G modem work as expected for all the devices there. Otherwise, the modem would use the USB interface only on the SBC. Additionally, because the modem was new at that time, there was no router or board that automatically detected it, hence the use of OpenWRT and the configs. The previous design by my colleagues was using Microhard (LTECube-CAT4 ), which was not only mediocre being CAT4 150mbps LTE only (no 5G), but also troublesome with continuous disconnections and performance issues. So that design needed an improvement with the Quectel RM502.
vid4: Testing the AgileX Bunker and driving it over the internet.
-
Cameras: Nothing fancy, they were off-the-shelf IP cameras and even one webcam.
-
Other peripherals like network switch, power regulators, DC-DC step down converters, antennas, DIN rails, terminal blocks, etc.
-
Software: Besides all what was mentioned above, I had to pipe the video through gstreamer to achieve the lowest possible latency.
-

Img2: The AgileX Bunker during the process of the integration. Note: You can see in the picture above, the Microhard is pulled out as it was causing the issues, a component that was improved with a better modem later. In the back, you can see the Scout Mini too.
Challenges
No major challenges more than what you would expect in any integration project, except for tight schedules and some logistic concerns as it was during the worldwide chip shortage.
Conclusion
This project demonstrated the successful integration of various systems, platforms, hardware and software to achieve the goal of making a fully tele-operated UGV over cellular network. The project met the client requirements and objectives, such as battery endurance, small form factor, easy controls, real-time video feeds, and dashboard monitoring, while utilizing the latest technologies, to enhance the performance and functionality of the UGV. Furthermore, the project laid the foundation for future improvements and extensions, such as adding autonomy, object recognition, and other features to the UGV. The project was delivered on time and within budget, despite the challenges of tight schedules and chip shortage.

Img3: Myself and my colleague during a joint tele-operation mission, I was flying the drone with the PS5 controller and he was driving the UGV with the Xbox one!
Note: The comment section is powered by Cactus/Matrix. If you use the official Matrix server, you are good to go. However, if you use your personal Matrix server, make sure to log in with the first button and use your own client. This is because my CSP only allows Cactus/Matrix domains to connect from this site, and most likely, your profile picture will be broken!
AgileX Site
AgileX Scout mini Site
AgileX Bunker Site
Rocos aquisition by DroneDeploy Site
Quectel Specs Sheet
Microhard LTECube-CAT4